FMS-200 - Système didactique modulaire d'assemblage flexible
Un équipement totalement modulaire et flexible, fabriqué avec des composants industriels, que permet une formation complète à l’automatisation industrielle / mécatronique.
Un équipement totalement modulaire et flexible, fabriqué avec des composants industriels, que permet une formation complète à l’automatisation industrielle / mécatronique.
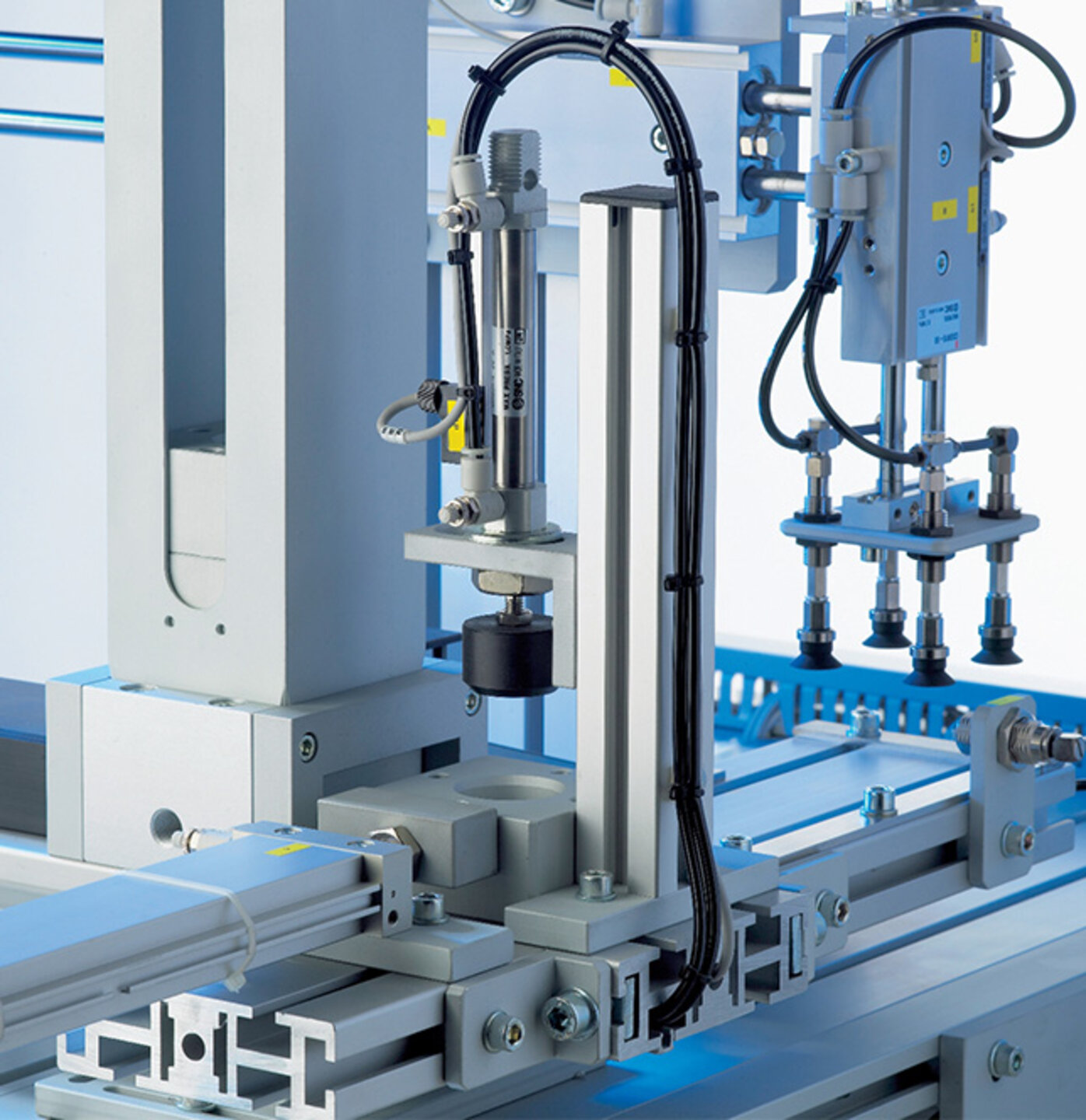
Formation intégrale en automatisation industrielle. A travers les différentes stations de processus se réalise l'assemblage d'un mécanisme de rotation. Pour donner davantage de flexibilité au système, les différentes stations sont adaptées pour le montage d’une grande diversité d'ensembles, introduisant des variations dans les matériaux, les couleurs et les tailles de pièces. La combinaison de toutes ces possibilités permet d’obtenir jusqu’à vingt-quatre ensembles différents, rendant possible l’utilisation de stratégies de gestion de production. Le système comprend toute une série d’opérations d’alimentation, de manipulation, de vérification, de charge, etc. réalisées grâce à des composants de différentes technologies (pneumatique, hydraulique, capteurs, robotique, etc.). FMS-200 inclut le système de simulation de pannes qui permet de générer jusqu’à 16 pannes différentes que l’utilisateur devra diagnostiquer.
Galerie d’images




2 versions
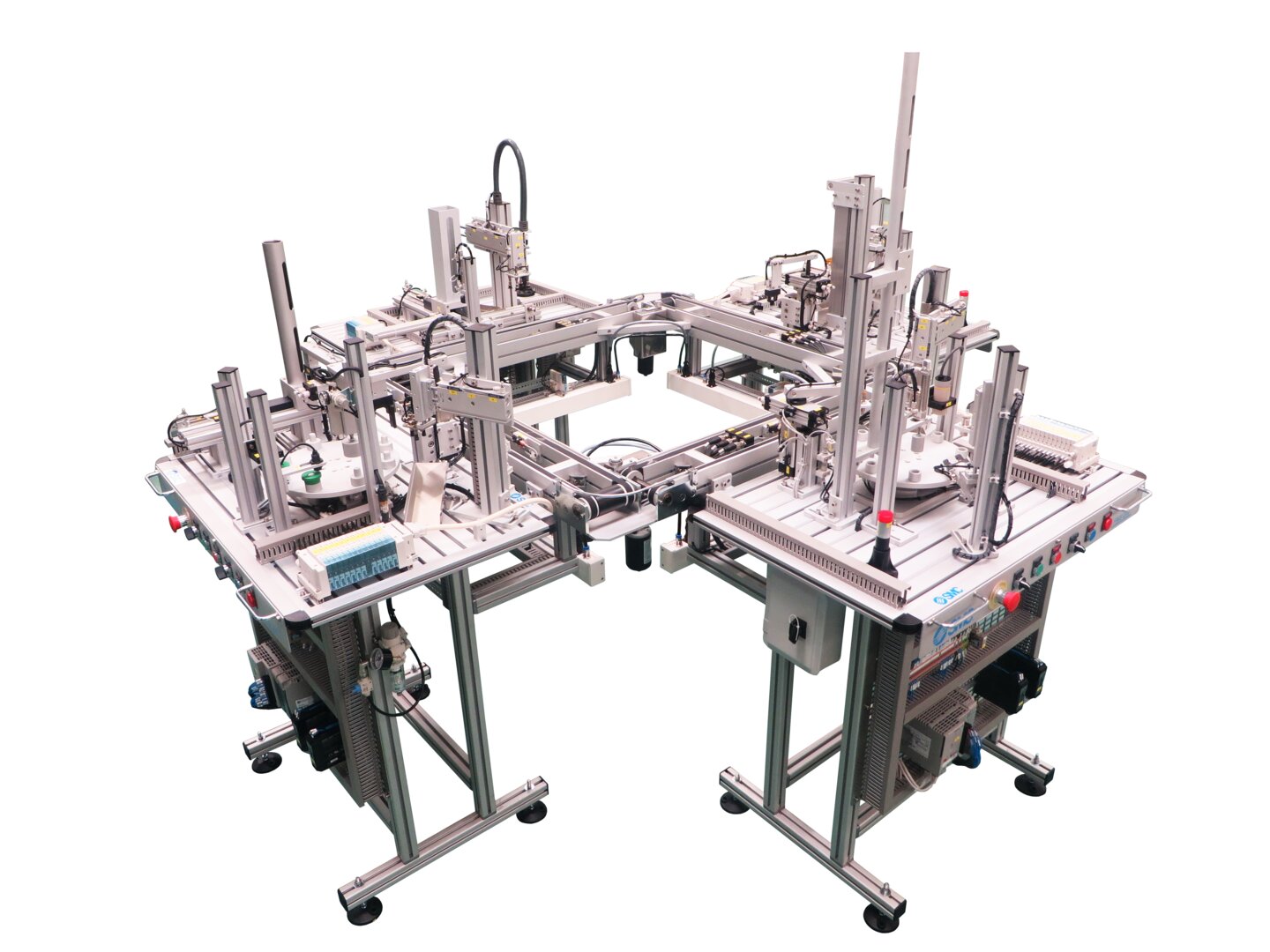
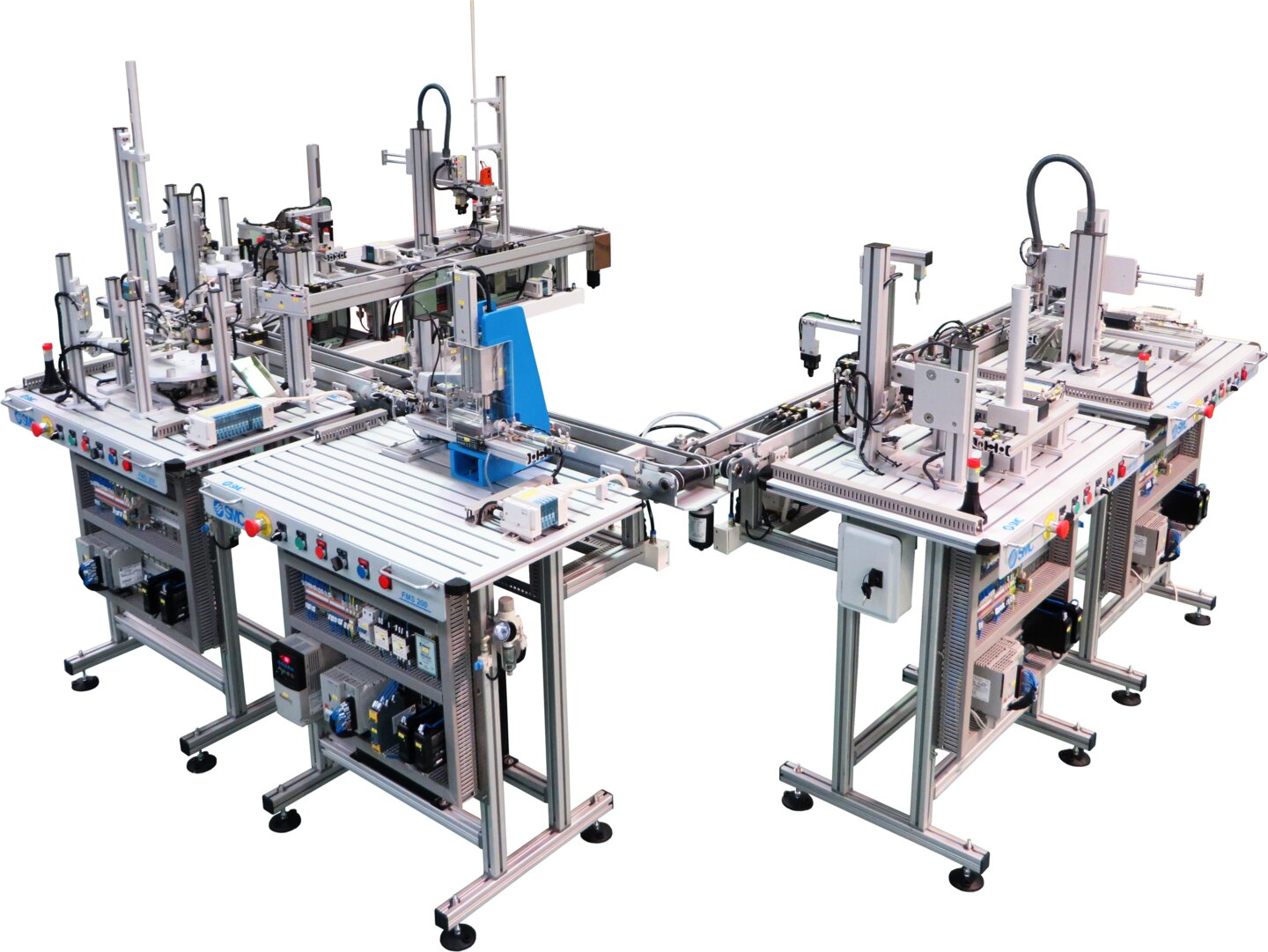
Il s’agit d’un système de transfert rectangulaire par lequel les palettes portant le produit en cours de fabrication assemblé circulent tout au long des stations. Il permet d’intégrer un maximum de huit stations de travail.
Dans cette version, chacune des stations intègre un tronçon de transfert.Un grand nombre de combinaisons différentes de stations peuvent être développées grâce à la possibilité de réunir les stations à 90° ou 180°.
Avec ce système, vous pourrez...
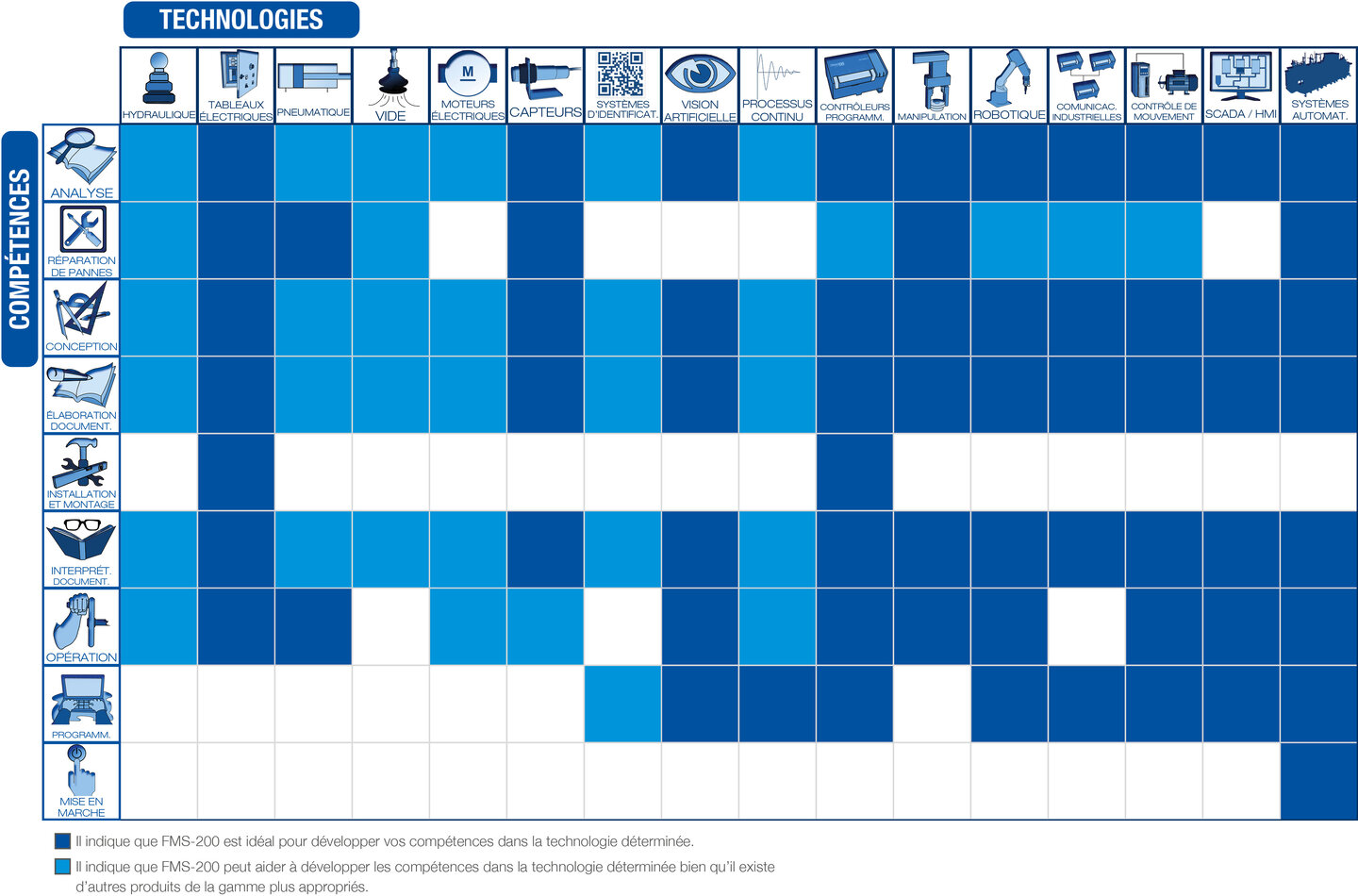

La technologie des contrôleurs programmables (API) se réfère à l'utilisation de dispositifs électroniques industriels programmables conçus pour l'automatisation et le contrôle de processus et de machines par l'exécution d'instructions logiques, séquentielles et temporisées à partir d'entrées de capteurs et la génération de sorties de contrôle fiables dans des milieux industriels.

Ensemble de systèmes et de composants électriques organisés dans une armoire ou une enveloppe, destinés à la distribution, à la protection et au contrôle de l’énergie électrique au sein d’un processus automatisé. Il comprend des éléments tels que des interrupteurs, des dispositifs de protection, des contacteurs, des relais, des borniers et des dispositifs de commande permettant de gérer le fonctionnement sûr et efficace des machines et des systèmes industriels.

Ensemble de systèmes et de techniques utilisant l’air comprimé pour produire, transmettre et contrôler l’énergie au sein d’un processus automatisé. Elle comprend des composants tels que des compresseurs, des vannes, des actionneurs et des unités de maintenance permettant d’actionner, de réguler et de séquencer les mouvements, en garantissant l’efficacité, la fiabilité et la sécurité dans l’exécution des tâches industrielles.

Ensemble de dispositifs mécaniques conçus pour déplacer, positionner et manipuler des pièces ou des outils au sein d’un processus automatisé. Ces systèmes, qui peuvent être manuels, assistés ou robotisés, permettent d’exécuter des tâches telles que le transport, l’assemblage, le chargement et le déchargement ou l’emballage, en améliorant la précision, la répétabilité et l’efficacité du processus, tout en réduisant l’effort humain et en augmentant la productivité.

Ensemble de systèmes et de techniques utilisant le vide comme moyen de manipuler, saisir et transporter des objets au sein d’un processus automatisé. Il comprend des composants tels que des générateurs de vide, des ventouses, des vannes et des capteurs permettant de réaliser des opérations de manutention de manière sûre, précise et efficace, notamment dans des applications de pick & place, d’emballage et de manipulation de pièces, en améliorant la productivité et la fiabilité du processus.

Ensemble de dispositifs chargés de transformer l’énergie électrique en énergie mécanique afin de générer un mouvement au sein d’un processus automatisé. Il comprend différents types de moteurs et d’éléments d’entraînement permettant d’ajuster la vitesse, le couple et la position, rendant possible un contrôle précis et efficace des machines et des systèmes industriels.

Ensemble de dispositifs conçus pour détecter et mesurer des variables physiques ou chimiques au sein d’un processus automatisé, en les transformant en signaux pouvant être interprétés par des systèmes de contrôle. Il comprend des capteurs de position, de proximité, de température, de pression ou de débit, permettant d’obtenir des informations sur l’état du processus et de faciliter sa supervision, son contrôle et son optimisation.

Le codage industriel est le processus par lequel un identifiant unique est attribué à chaque équipement, produit, item ou système dans une entreprise. Les étiquettes industrielles et d’autres éléments comme des cartes ou des signaux offrent une solution rapide et fiable pour l’identification des équipements et installations. Ce sont des systèmes comme RFID, BCR, NFC et QR.

Ensemble de systèmes et de techniques permettant de capter, traiter et analyser des images afin d’extraire des informations pertinentes au sein d’un processus automatisé. Elle intègre des caméras, des capteurs, des systèmes d’éclairage et des logiciels de traitement permettant l’inspection, l’identification et le contrôle des objets, en améliorant la qualité, la précision et l’efficacité dans les applications industrielles.

Ensemble de systèmes et de techniques utilisant des fluides sous pression, généralement de l’huile, pour produire, transmettre et contrôler l’énergie au sein d’un processus automatisé. Il comprend des composants tels que des pompes, des vannes, des actionneurs et des accumulateurs permettant d’actionner, de réguler et de contrôler des mouvements avec une grande force et précision, en garantissant la fiabilité, la sécurité et l’efficacité dans des applications industrielles exigeantes.

La production continue est une méthode de production par flux utilisée pour fabriquer, produire ou traiter des matériaux sans aucune interruption. La production continue s’appelle également processus continu ou processus de flux continu parce que les matériaux, que ce soit en vrac ou fluides par leur traitement, sont continuellement en mouvement, connaissent des réactions chimiques ou sont soumis à un traitement mécanique ou thermique. La production continue se distingue par la production par lots ou batch.

Ensemble de systèmes et de technologies chargés de la conception, du contrôle et de l’application de robots industriels pour l’exécution automatique de tâches au sein d’un processus automatisé. Il comprend des composants tels que des manipulateurs, des contrôleurs, des capteurs et des outils permettant de réaliser des opérations de manière précise, flexible et répétable, en améliorant la productivité, la qualité et la sécurité dans les environnements industriels.

La communication industrielle se réfère à un système de transmission de données conçu pour permettre la communication entre dispositifs de terrain, comme des capteurs, actionneurs et contrôleurs, et les systèmes de supervision et de contrôle dans l’industrie.

Ensemble de systèmes et de techniques chargés de réguler et de coordonner le déplacement, la vitesse, la position et l’accélération des éléments mobiles au sein d’un processus automatisé. Elle repose sur l’intégration de dispositifs tels que des moteurs, des variateurs, des capteurs et des contrôleurs, permettant d’exécuter des mouvements précis, synchronisés et répétables, en optimisant les performances, la qualité du processus et l’efficacité du système.

SCADA, acronyme de Supervisory Control And Data Acquisition (Contrôle Supervision et Acquisition de Données) est un concept utilisé pour réaliser un logiciel pour ordinateurs qui permet de contrôler et de superviser des processus industriels à distance. Ils permettent la collecte de données en temps réel, la surveillance de l’état des équipements, l’interaction avec le système ainsi que la gestion des alarmes et des événements, facilitant la prise de décision et l’amélioration du contrôle opérationnel dans des environnements automatisés.

Ensemble de systèmes intégrés combinant différentes technologies pour contrôler et exécuter des processus de manière automatique, sans intervention humaine directe ou avec une supervision minimale. Ils comprennent des éléments de contrôle, des actionneurs, des capteurs et des systèmes de communication permettant la coordination des tâches, en améliorant l’efficacité, la qualité, la sécurité et la productivité dans les environnements industriels.
Augmentez vos connaissances sur les technologies de l’Industrie du Futur et développez des compétences poussées en mécatronique en utilisant une plateforme basée sur le monde industriel réel.
Mécanisme de rotation

