MAP-200 - Sistemas de manipulación
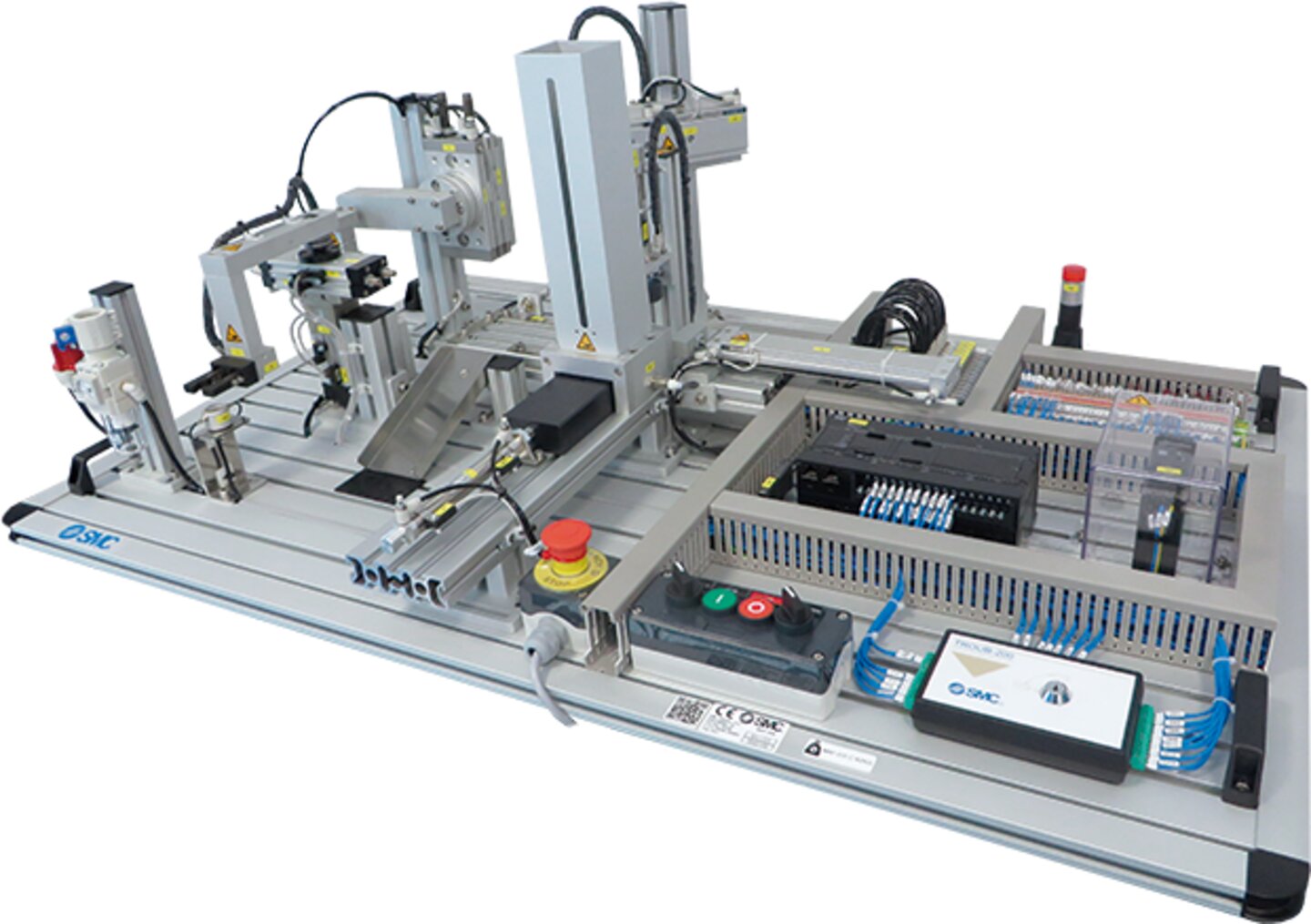
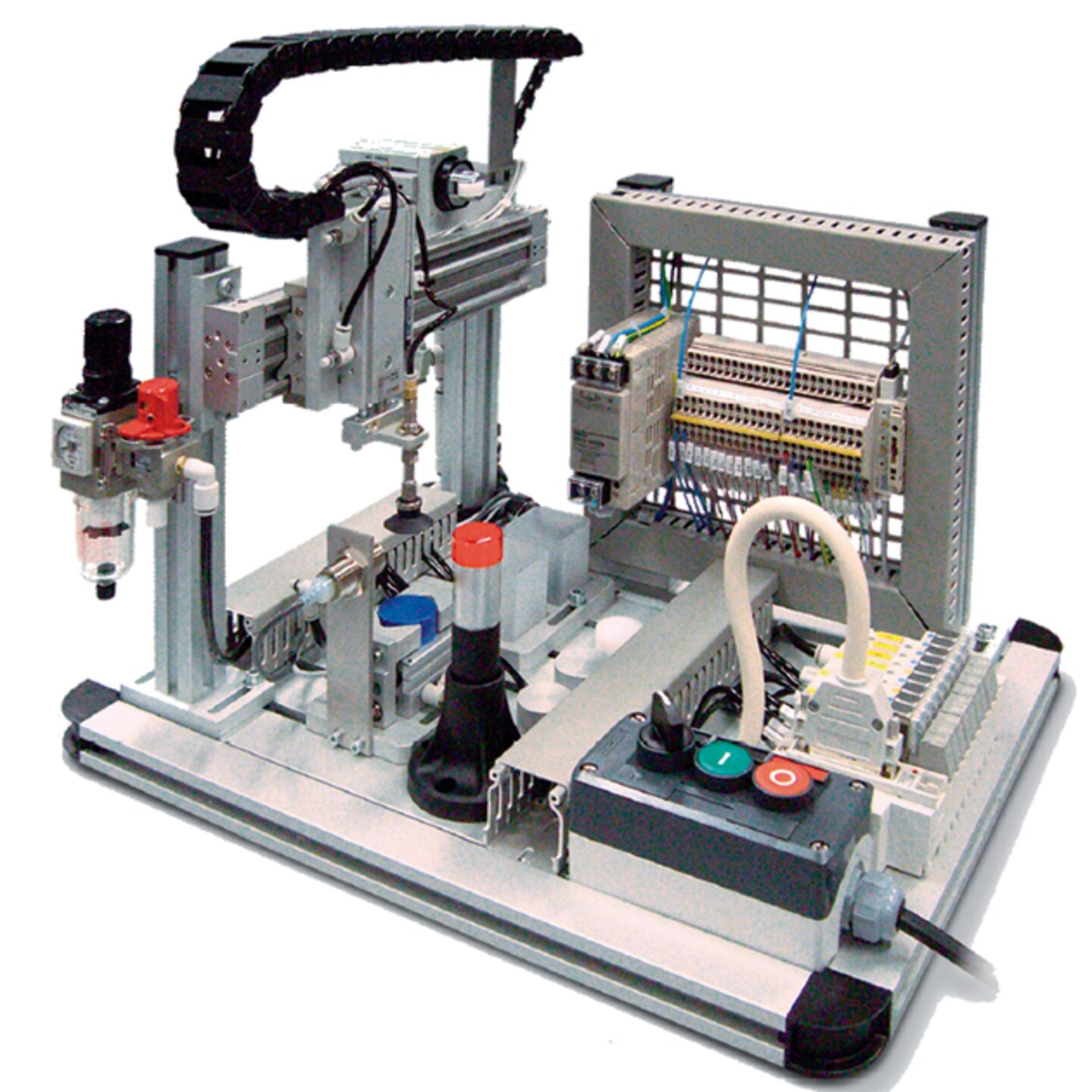
Siete equipos didácticos independientes y diferentes. Cada uno de ellos reproduce un proceso de manipulación distinto, proporcionando una amplia visión de la realidad industrial.
Siete equipos didácticos independientes y diferentes. Cada uno de ellos reproduce un proceso de manipulación distinto, proporcionando una amplia visión de la realidad industrial.
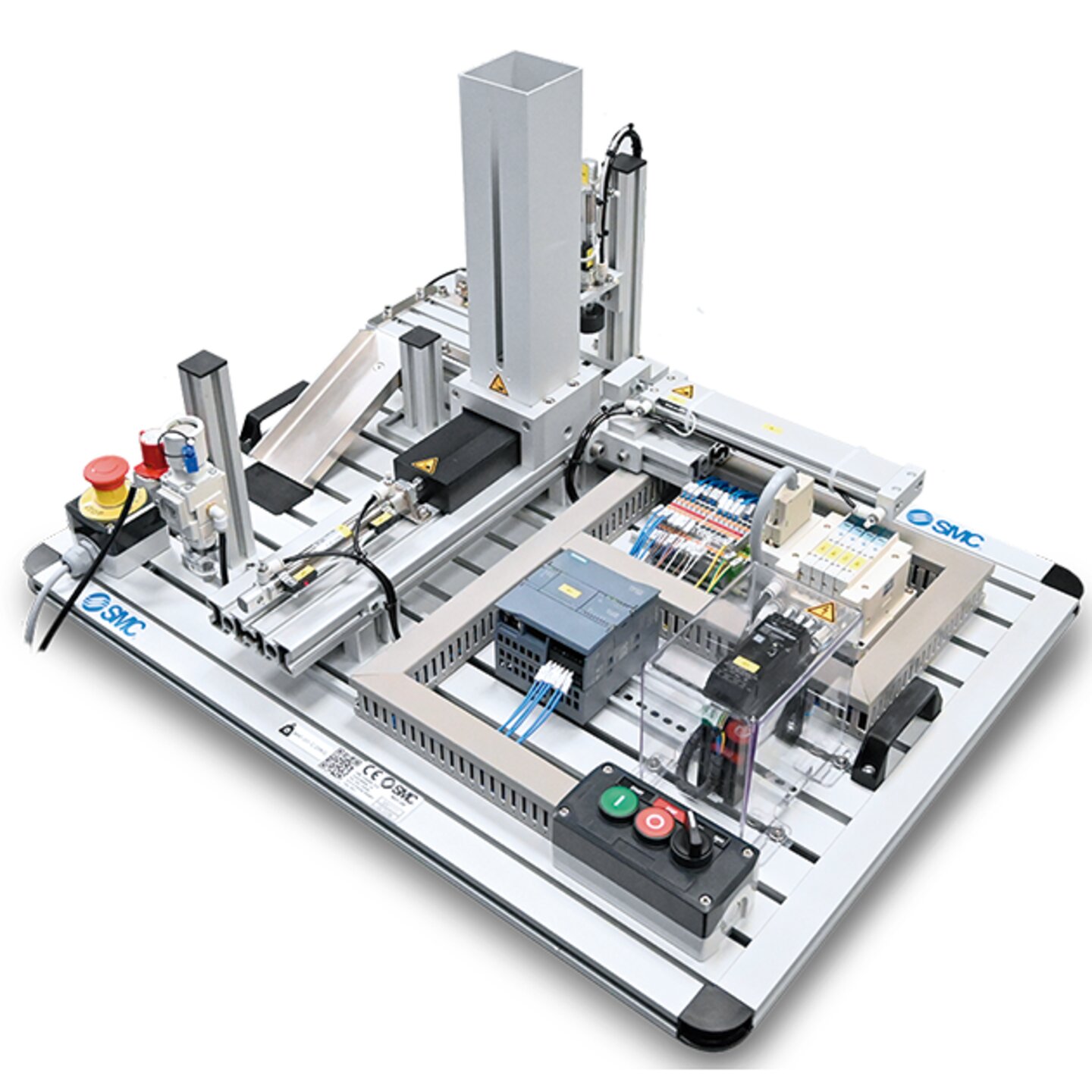
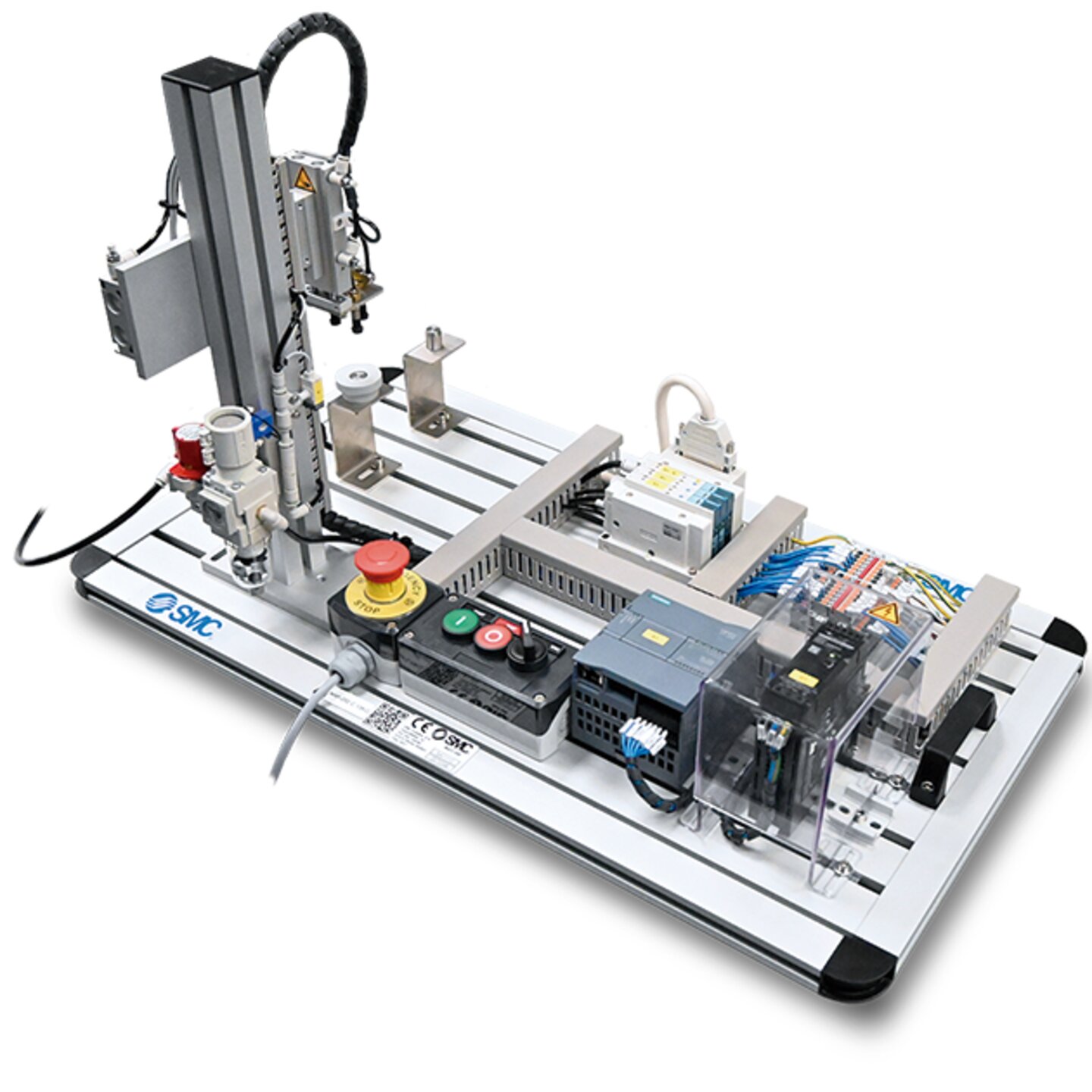
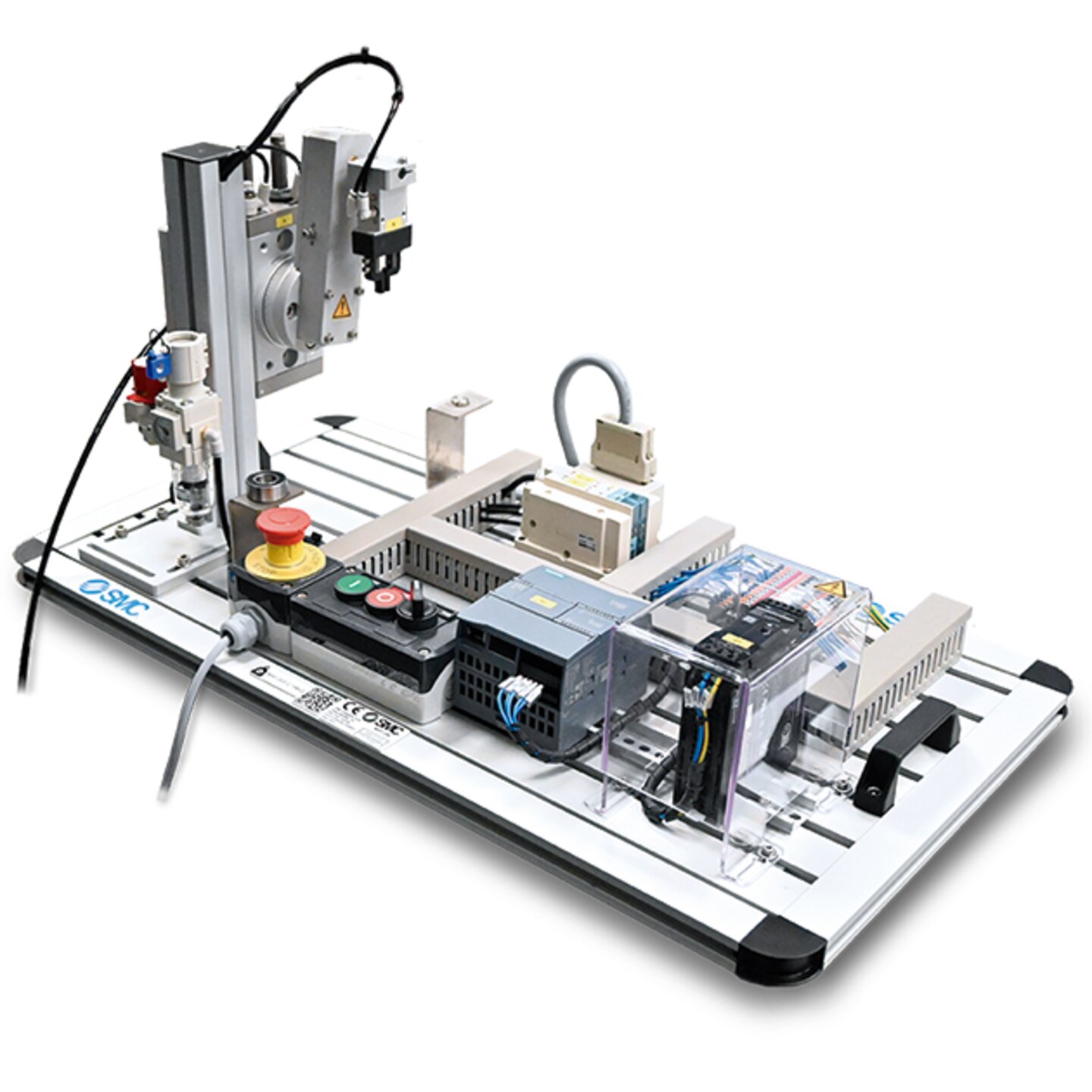
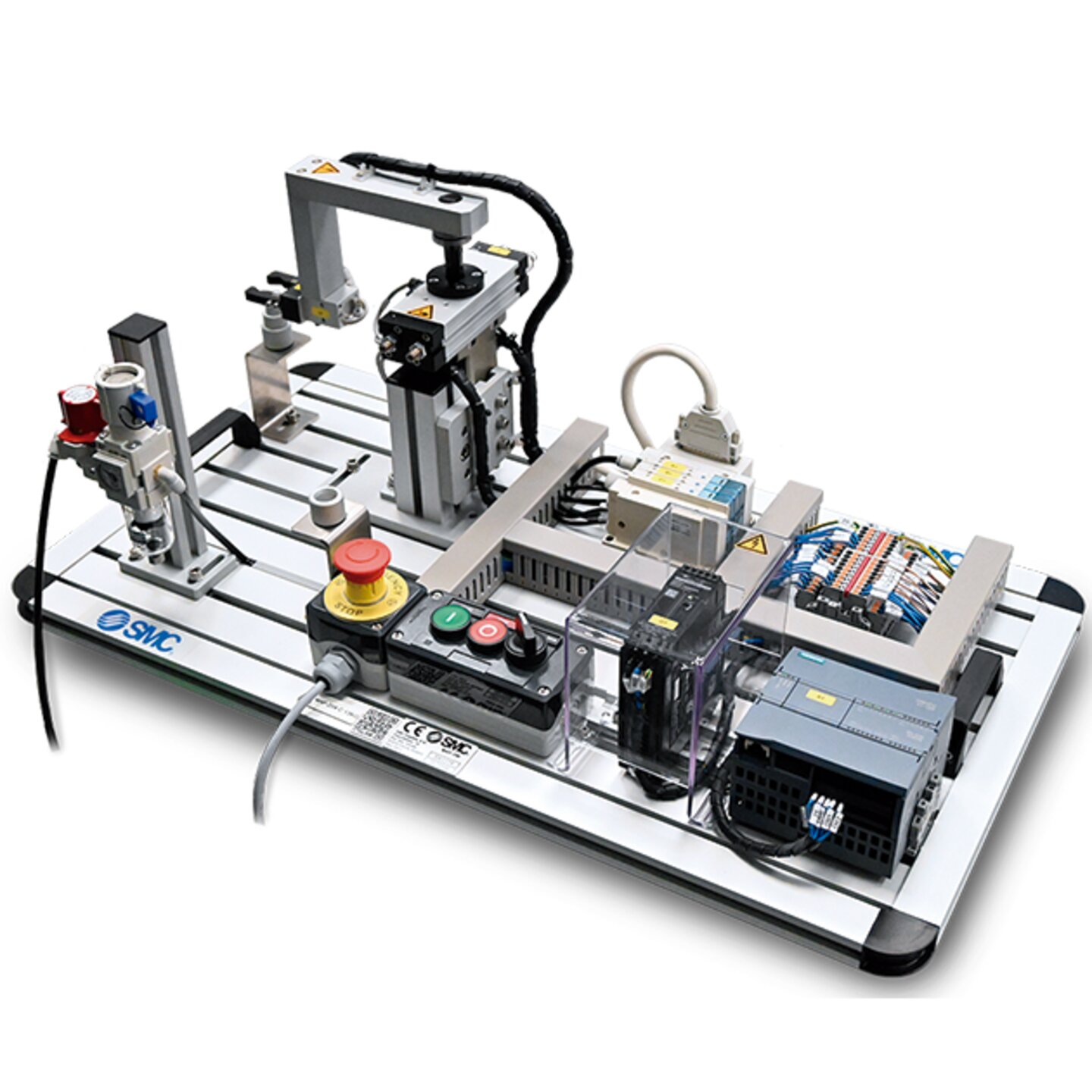
La serie MAP-200 consta de siete equipos independientes y diferentes. Cada uno de ellos reproduce un proceso de manipulación distinto, proporcionando una amplia visión de la realidad industrial. En este vídeo se muestran las características más destacables de cada uno de los sistemas que forman la serie de sistemas de manipulación MAP-200.

Galería de imágenes


Con este sistema podrás...
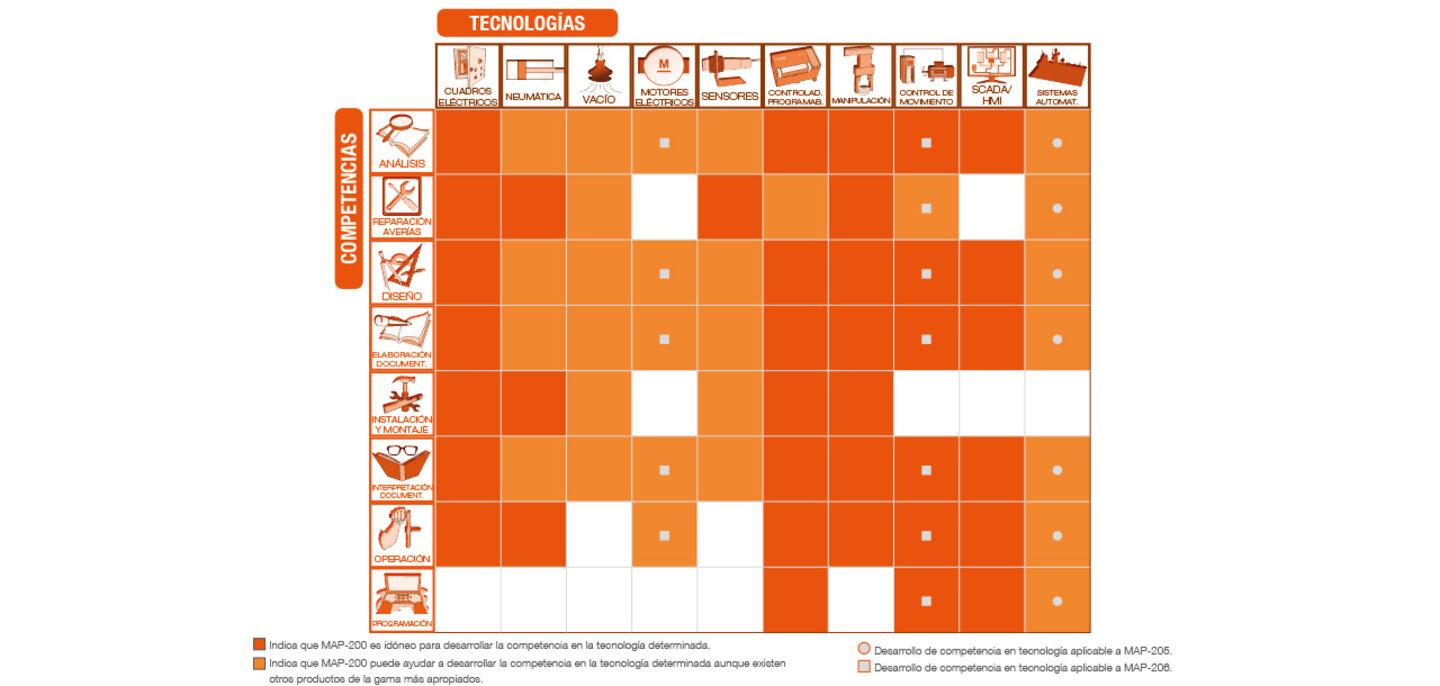

Es la parte del robot que entra en contacto con las piezas a la hora de desplazarlas, retenerlas o generar mediciones.

Es un término general que abarca varios tipos de sistemas de control e instrumentos asociados utilizados para el control de procesos industriales. Tales como, sistemas de control de supervisión y adquisición de datos (SCADA), o sistemas de control distribuido (DCS) y controladores lógicos programables (PLC).

Es uno de los componentes principales de una instalación eléctrica, en él se protegen cada uno de los distintos circuitos en los que se divide la instalación a través de fusibles, protecciones magnetotérmicas y diferenciales.
Dentro de la física, la neumática forma parte de la rama mecánica y estudia el equilibrio y movimiento de flujos gaseosos. Además es la tecnología que emplea el aire comprimido como modo de transmisión de la energía necesaria para mover y hacer funcionar mecanismos.
El vacío es la ausencia total de materia. La palabra se deriva del adjetivo latino vacuus (vacío neutro) que significa "vacante" o "vacío". Una aproximación a tal vacío es una región con una presión gaseosa mucho menor que la presión atmosférica. En industria, el vacío permite generar una unión temporal entre la máquina y la pieza. De este modo es posible desplazar elementos ligeros en la producción.

Un motor eléctrico es un dispositivo que convierte la energía eléctrica en energía mecánica de rotación por medio de la acción de los campos magnéticos generados en sus bobinas. Son máquinas eléctricas rotatorias compuestas por un estator y un rotor.
Es todo aquello que tiene una propiedad sensible a una magnitud del medio, y al variar esta magnitud también varía con cierta intensidad la propiedad, es decir, manifiesta la presencia de dicha magnitud, y también su medida. Los avances en plataformas de microcontroladores de fácil uso han permitido la expansión de sensores entorno a campos como la presión, la temperatura y la medida de flujos.

El control de movimiento es un subcampo de la automatización, que abarca los sistemas o subsistemas involucrados en mover partes de máquinas de manera controlada. Los sistemas de control de movimiento se utilizan ampliamente en una variedad de campos con fines de automatización, incluida la ingeniería de precisión, la microfabricación, la biotecnología y la nanotecnología.

SCADA, acrónimo de Supervisory Control And Data Acquisition (Control Supervisión y Adquisición de Datos) es un concepto que se emplea para realizar un software para ordenadores que permite controlar y supervisar procesos industriales a distancia.

Los sistemas automatizados son sistemas informáticos que realizan tareas sin intervención o asistencia humana. Están diseñados para funcionar de forma automática y continua, a menudo en respuesta a desencadenantes o condiciones predefinidas. El uso de la automatización se ha vuelto cada vez más popular en varias industrias, incluidas la fabricación, la atención médica, las finanzas, el transporte y más.
